

上海(hǎi)氣動機械手作用有(yǒu)哪些?
文章(zhāng)出處:本站 人氣(qì):10337 發表時間:2022-05-30 12:29:11
氣動機械(xiè)手的末端工具應該怎樣去選擇?
氣動機械手是(shì)現(xiàn)如今注塑生產中的重要生(shēng)產設備,但是很多注塑生產商(shāng)未曾對機械手末端工具的使用加以重視。其實在注塑成型的過程中,氣動機械手末端工具是一個相當重要的組成部分。如果注塑機械手和柔性的末端工具連接在(zài)一(yī)起,可以很經濟方便地進行多種製品的(de)移動操作。
氣動機(jī)械手末端工具係統怎樣選(xuǎn)擇才能符合製品需要呢?為了選擇出最高效(xiào)的機械手臂末端工(gōng)具係統,首先應綜合考慮(lǜ)來自修(xiū)理部門、采購部門和生產(chǎn)部門的意見。同時還應該考慮影響製品脫模的其他因素:
1.為了避免製品上出現不必要的斑(bān)痕,應考慮對模具做(zuò)適當的修正,以使製(zhì)品能夠更方便地被移出。
2.在製品外觀(guān)的設計上,通過添加小的倒角以(yǐ)使(shǐ)它更容易脫(tuō)模。
3.改變材料(liào)溫度不僅能使製品(pǐn)的脫模更為容易,而且還可(kě)以減少製品脫模(mó)後表(biǎo)麵出現的斑痕或發生形變(biàn)的幾(jǐ)率。
4.機械手上是否有足夠的空氣(qì)/真空電路以(yǐ)及電流輸入(rù)輸出(chū)端(duān),以便它(tā)同機械手臂末端工具相連接。
5.氣動機械手能不能達到成型周期所(suǒ)要求的速度?

氣動機械手的運用可以幫企業節省(shěng)大量的人力成本,提高產品的品質及工作效率,是企業邁進智能製造較(jiào)好的幫手。
氣動機械手的功能及優點 :
1.上下(xià)軸(zhóu)伺服馬達驅動,成品臂上(shàng)下軸由(yóu)AC伺服馬達驅動,可快速(sù)的橫行動作,節(jiē)省模內(nèi)時間,增加(jiā)效率,並可在模外設置不同的(de)置物高度,定位精度為 0.2MM,噴離型劑組可設定幾(jǐ)模噴,每(měi)次噴多久,噴頭可(kě)以裝在手臂或模具上。
2.引拔(bá)位置、行程電動遙控調整,節(jiē)省(shěng)調整時間增加操(cāo)作的(de)安全性。上下電動調整行程,上下行程電動遙控調整,節省調(diào)整時間增加操(cāo)作的安全性。橫行軸數字控(kòng)製,數字設定橫行(háng)行程(chéng),可(kě)多點及循放成品(pǐn),最多可放99點。用於排列成品。
3.橫行伺(sì)服馬達驅動,橫行軸可選用AC伺服馬達驅動,並采用精(jīng)密級行星減速機以齒輪齒條傳動,速度快定位準確;定位精度達0.1MM,可應用於需定位準確之取出。
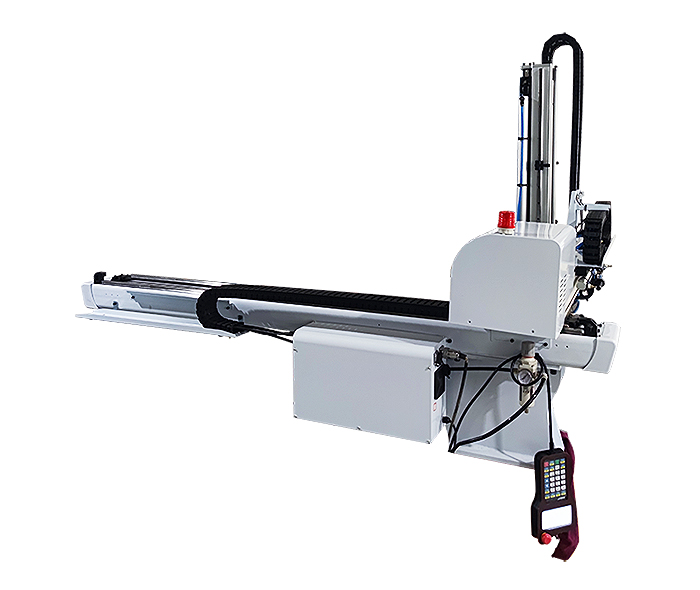
氣動機械手的雙截式手臂采用高剛性線性滑軌(guǐ)及鋁合金結構梁,特殊設計的皮帶倍速機構,可大符度的(de)縮短上下(xià)手臂(bì)的結構高度,上下氣(qì)缸隻(zhī)需一半的行(háng)程即可達到全行(háng)程。除了可增(zēng)加上下行(háng)的速度及穩(wěn)定度,並且可配合廠房高度低之場所。
氣動機械手在設(shè)計的過程中,當(dāng)確定(dìng)運動速度氣動機械手各動作的最大行程確定之(zhī)後,可根據生產需(xū)要的工作拍節分配每個動作的時間,進而確(què)定各動(dòng)作的運動速度。液壓上料氣動機械手要完成整個上料過程,需完成夾緊(jǐn)工件、手臂升降、伸縮(suō)、回轉,平移等(děng)一係列的動作,這些動作都應(yīng)該(gāi)在工作(zuò)拍節規定的時間內完成,具體(tǐ)時間的(de)分配(pèi)取決於很多因素,根據(jù)各種因素反複考慮,對分配的方案進行比較,才能確定。氣動機械手的總動作時(shí)間(jiān)應小於或等於工作拍節,如果(guǒ)兩個動作同時進行,要按時間長的計算,分(fèn)配各(gè)動作時(shí)間應(yīng)考慮以下要求:
一.給定的運動時間應大於電氣、液壓元件的執行時間;
二.在工作拍節短、動(dòng)作(zuò)多的情況下,常使幾個動作同時進行。為此驅動係統要采取相應的措(cuò)施,以保證動作的同步。
三.伸縮運動的速度(dù)要大於回轉運動的速度(dù),因為回轉運(yùn)動的慣(guàn)性一般大於伸縮運動的慣性。在滿足工(gōng)作(zuò)拍節要求的條件下,應盡量選取(qǔ)較底的運動速度。氣動機械手的運動速度與臂力、行程、驅動方式、緩衝方式、定位方式都有很大關係,應根據具體情(qíng)況加以(yǐ)確定。

氣動機械手(shǒu)的(de)應(yīng)用領域(yù):
1.工業製造領(lǐng)域:
主要(yào)讓機器人在(zài)機械製造業中代替人完(wán)成(chéng)大批量、高質量要求的工作,如汽(qì)車製造、艦船製造及某些家電產品(電視機、電冰箱、洗衣機)的製造等。化工等(děng)行業自動化生產(chǎn)線中的點焊、弧焊、噴(pēn)漆、切割、電子裝配及物(wù)流係統的搬運(yùn)、包裝等工作,也有部分是由(yóu)機器人完成的。
2.軍事領域:
主(zhǔ)要(yào)讓機器人執行一些自動的偵察與控製任務,尤其是一(yī)些相對較為危險(xiǎn)的任務,比如,無人偵察機、拆除炸彈的機(jī)器人及掃雷機器(qì)人等。機器人還可以代替士兵去完成那些不太複雜的工程(chéng)及後勤任務,從而使(shǐ)戰士從繁(fán)重的(de)工作中解脫出來,去從事更加(jiā)重要的(de)工作。
3.娛樂領域:
機器人在娛樂領(lǐng)域的應用十分廣(guǎng)泛,比如,機器人足球大(dà)賽、機器人彈鋼琴和機器人寵物等。
4.醫療領域:
機器人主要用來輔(fǔ)助護(hù)士進行一(yī)些(xiē)日常的工作,比如,幫助醫生運送用(yòng)藥(yào)品及自動監測病房內的空氣質量,等等(děng)。宜用機器人還可以協助醫生完成一些難度較高的手術,例(lì)如,眼部(bù)手術、腦部手術等。美國還發明了一種可(kě)以(yǐ)進入人體血管的(de)微型機器人,幫助醫生在病人的血管內滅殺病毒。

氣動機械手主要由執行機構、驅動機構和控製係統三大部分組成。
那你知道(dào)它的驅動(dòng)機構有那些嗎,豆奶APP下载安装來看看。他們都是有那些作用呢。
氣動機械(xiè)手的執行機構分為(wéi)手部、手臂(bì)、軀幹;
3、軀幹軀幹是安裝手臂、動力源(yuán)和各種執(zhí)行機構的(de)支架。
1、手部:手部安裝在手臂(bì)的前端。手臂(bì)的內孔中裝有傳動軸,可把運用傳給手腕,以轉動、伸曲手腕、開閉手(shǒu)指。
氣(qì)動機械手手部的構造係模仿人的手指,分為無關節、固定關節和自由關節3種。手(shǒu)指的數量又可分為二指、三指、四指等,其中以二指(zhǐ)用的最多。
可根據夾持(chí)對象的形狀和大(dà)小配備多種形(xíng)狀和大小的夾頭以適應操作的需要。所謂沒有手指的手(shǒu)部,一般都是指真空吸盤或磁性吸盤。
2、手臂:手(shǒu)臂的(de)作用是引導手(shǒu)指準確地抓住工件,並運送到所需的位置上。
為了使氣動機械(xiè)手能夠正確地工作,手臂的3個自由度都要精確地定(dìng)位。
氣動(dòng)機械手控製的要素包括(kuò)工作順序、到達位置、動作時間、運動速度、加減速度等。氣動機械手的控(kòng)製分為(wéi)點位控製和連(lián)續軌跡控製兩種。
控製(zhì)係統可根據動作的要求,氣動機械手設計采用數字(zì)順序控(kòng)製。它(tā)首先要編製程序加(jiā)以存儲(chǔ),然後再根據規定的程序,控製氣動機(jī)械手進行工作程序的存儲方式有分離存儲和集中(zhōng)存儲兩種(zhǒng)。
分離存儲是將(jiāng)各種控製因素的信息分別存儲於兩(liǎng)種以上的存儲裝置中,如順序信息存儲於插(chā)銷板、凸輪轉鼓、穿孔帶內;位(wèi)置信息存儲於時間繼(jì)電器(qì)、定(dìng)速回轉鼓等;集中存儲是將各種控製因素的信息全部存(cún)儲於一種存儲裝置內,如磁帶、磁鼓等。
這種方式使用於順序、位置(zhì)、時間、速度等必須(xū)同時控製的場合,即連續控製的情況下使用。
- 上一篇: 昆山五軸機械手做出來的產品質量怎樣?
- 下一篇: 安徽斜臂機械手工作效率如何?




